[tabby title=”Video Walkthrough”]
Learn the basics of controlling objects with your Smartphone through Bluetooth!
[tabby title=”Parts List”]
Acquiring the PartsHere’s what you will need:
TOTAL COST: ~$30.00
[tabby title=”Step 1″]
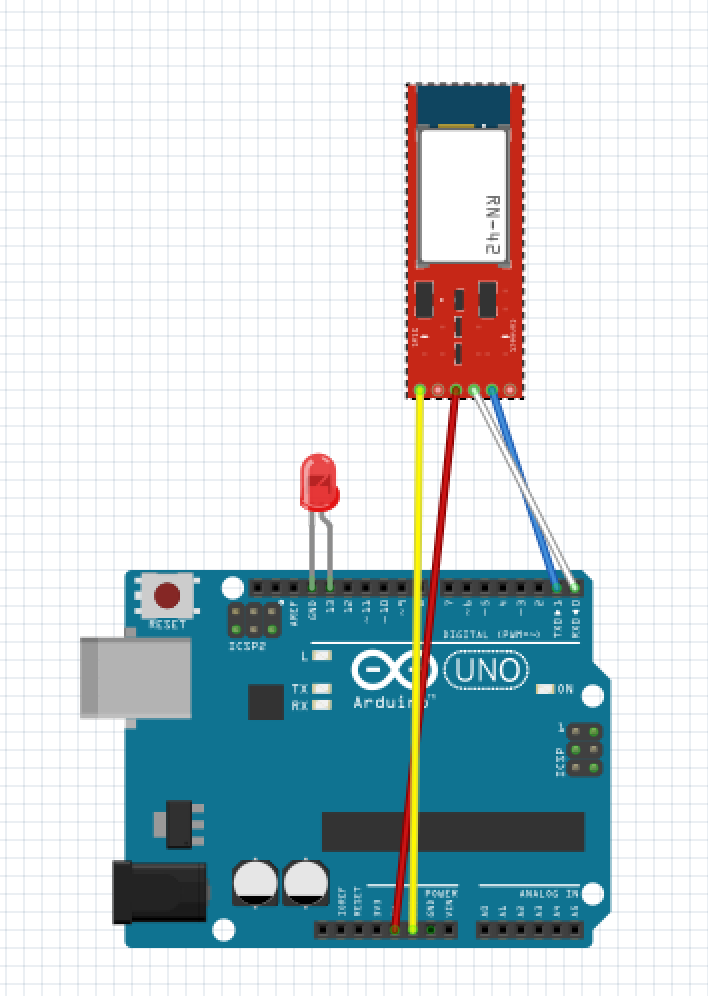
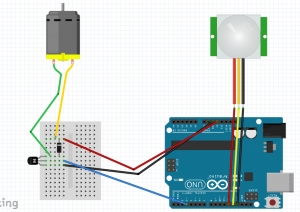
Adding Bluetooth to the Arduino
- To get started on adding bluetooth to the Arduino, you can watch my Arduino Bluetooth Basics Tutorial
-
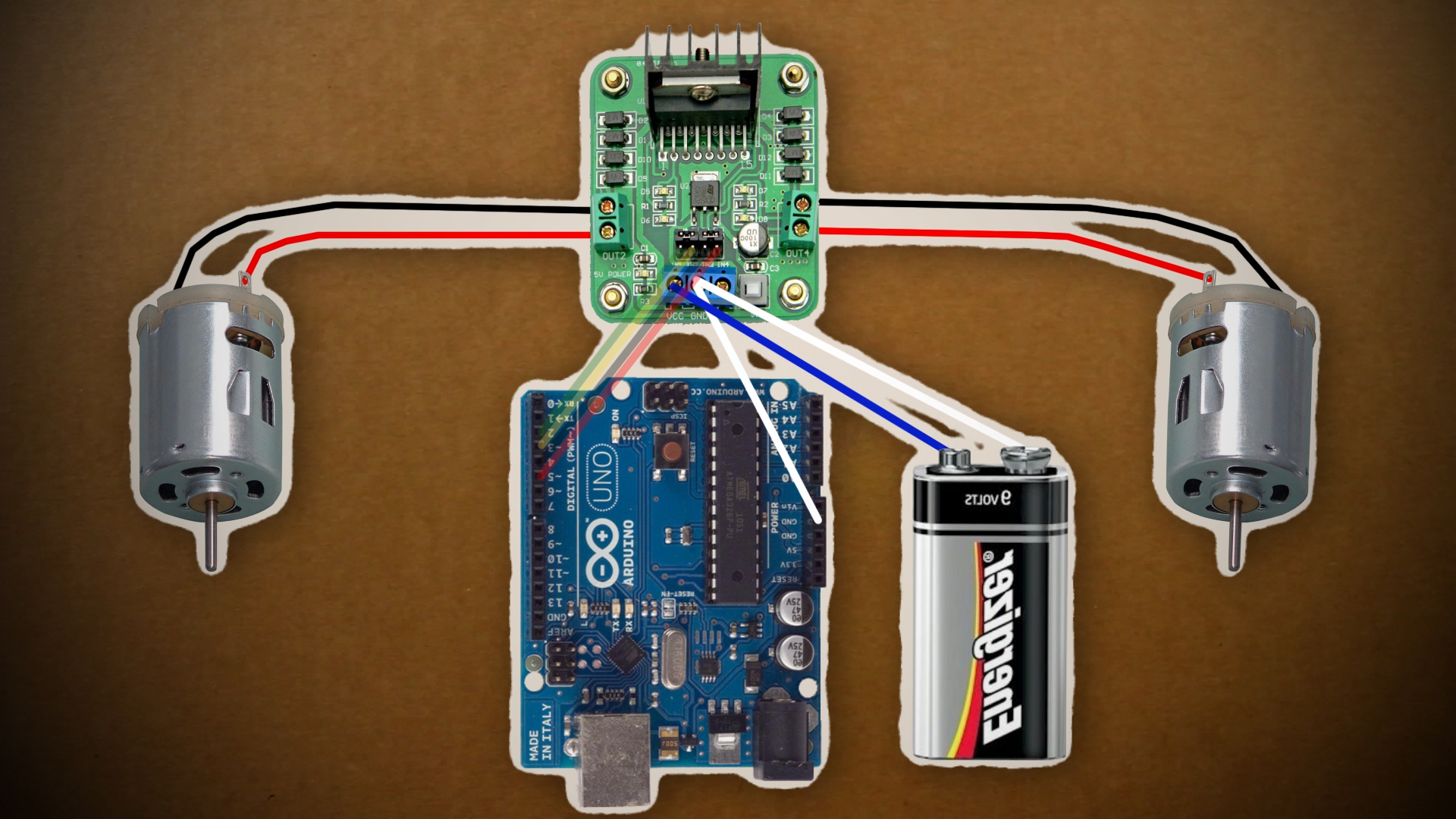
For a wiring diagram, you can reference my Fritzing sketch. (You need to download Fritzing
in order t. view this.)

[tabby title=”Step 2″]
Software
Android
- To find your bluetooth’s MAC address, a good program to use is called Ardudroid on the Google Play store.
- To control the car, Tolik777 has created a great app that you can download from here and install on your Anrdoid device.
Arduino
- The first thing you need to to is download the Arduino software for your computer.
- Then you need to copy this code to a new sketch and upload it to your Arduino device. Code provided by
#include "EEPROM.h"
#define D1 2 // direction of motor rotation 1
#define M1 3 // PWM left motor
#define D2 4 // direction of motor rotation 2
#define M2 5 // PWM right motor
#define HORN 13 // additional channel 1
//#define autoOFF 2500 // milliseconds after which the robot stops when the connection
#define cmdL 'L' // UART-command for left motor
#define cmdR 'R' // UART-command for right motor
#define cmdH 'H' // UART-command for additional channel (for example Horn)
#define cmdF 'F' // UART-command for EEPROM operation
#define cmdr 'r' // UART-command for EEPROM operation (read)
#define cmdw 'w' // UART-command for EEPROM operation (write)
char incomingByte; // incoming data
char L_Data[4]; // array data for left motor
byte L_index = 0; // index of array L
char R_Data[4]; // array data for right motor
byte R_index = 0; // index of array R
char H_Data[1]; // array data for additional channel
byte H_index = 0; // index of array H
char F_Data[8]; // array data for EEPROM
byte F_index = 0; // index of array F
char command; // command
unsigned long currentTime, lastTimeCommand, autoOFF;
void setup() {
Serial.begin(9600); // initialization UART
pinMode(HORN, OUTPUT); // additional channel
pinMode(D1, OUTPUT); // output for motor rotation
pinMode(D2, OUTPUT); // output for motor rotation
/*EEPROM.write(0,255);
EEPROM.write(1,255);
EEPROM.write(2,255);
EEPROM.write(3,255);*/
timer_init(); // initialization software timer
}
void timer_init() {
uint8_t sw_autoOFF = EEPROM.read(0); // read EEPROM "is activated or not stopping the car when losing connection"
if(sw_autoOFF == '1'){ // if activated
char var_Data[3];
var_Data[0] = EEPROM.read(1);
var_Data[1] = EEPROM.read(2);
var_Data[2] = EEPROM.read(3);
autoOFF = atoi(var_Data)*100; // variable autoOFF ms
}
else if(sw_autoOFF == '0'){
autoOFF = 999999;
}
else if(sw_autoOFF == 255){
autoOFF = 2500; // if the EEPROM is blank, dafault value is 2.5 sec
}
currentTime = millis(); // read the time elapsed since application start
}
void loop() {
if (Serial.available() > 0) { // if received UART data
incomingByte = Serial.read(); // raed byte
if(incomingByte == cmdL) { // if received data for left motor L
command = cmdL; // current command
memset(L_Data,0,sizeof(L_Data)); // clear array
L_index = 0; // resetting array index
}
else if(incomingByte == cmdR) { // if received data for left motor R
command = cmdR;
memset(R_Data,0,sizeof(R_Data));
R_index = 0;
}
else if(incomingByte == cmdH) { // if received data for additional channel
command = cmdH;
memset(H_Data,0,sizeof(H_Data));
H_index = 0;
}
else if(incomingByte == cmdF) { // if received data for EEPROM op
command = cmdF;
memset(F_Data,0,sizeof(F_Data));
F_index = 0;
}
else if(incomingByte == '\r') command = 'e'; // end of line
else if(incomingByte == '\t') command = 't'; // end of line for EEPROM op
if(command == cmdL && incomingByte != cmdL){
L_Data[L_index] = incomingByte; // store each byte in the array
L_index++; // increment array index
}
else if(command == cmdR && incomingByte != cmdR){
R_Data[R_index] = incomingByte;
R_index++;
}
else if(command == cmdH && incomingByte != cmdH){
H_Data[H_index] = incomingByte;
H_index++;
}
else if(command == cmdF && incomingByte != cmdF){
F_Data[F_index] = incomingByte;
F_index++;
}
else if(command == 'e'){ // if we take the line end
Control4WD(atoi(L_Data),atoi(R_Data),atoi(H_Data));
delay(10);
}
else if(command == 't'){ // if we take the EEPROM line end
Flash_Op(F_Data[0],F_Data[1],F_Data[2],F_Data[3],F_Data[4]);
}
lastTimeCommand = millis(); // read the time elapsed since application start
}
if(millis() >= (lastTimeCommand + autoOFF)){ // compare the current timer with variable lastTimeCommand + autoOFF
Control4WD(0,0,0); // stop the car
}
}
void Control4WD(int mLeft, int mRight, uint8_t Horn){
bool directionL, directionR; // direction of motor rotation L298N
byte valueL, valueR; // PWM M1, M2 (0-255)
if(mLeft > 0){
valueL = mLeft;
directionL = 0;
}
else if(mLeft < 0){
valueL = 255 - abs(mLeft);
directionL = 1;
}
else {
directionL = 0;
valueL = 0;
}
if(mRight > 0){
valueR = mRight;
directionR = 0;
}
else if(mRight < 0){
valueR = 255 - abs(mRight);
directionR = 1;
}
else {
directionR = 0;
valueR = 0;
}
analogWrite(M1, valueL); // set speed for left motor
analogWrite(M2, valueR); // set speed for right motor
digitalWrite(D1, directionL); // set direction of left motor rotation
digitalWrite(D2, directionR); // set direction of right motor rotation
digitalWrite(HORN, Horn); // additional channel
}
void Flash_Op(char FCMD, uint8_t z1, uint8_t z2, uint8_t z3, uint8_t z4){
if(FCMD == cmdr){ // if EEPROM data read command
Serial.print("FData:"); // send EEPROM data
Serial.write(EEPROM.read(0)); // read value from the memory with 0 address and print it to UART
Serial.write(EEPROM.read(1));
Serial.write(EEPROM.read(2));
Serial.write(EEPROM.read(3));
Serial.print("\r\n"); // mark the end of the transmission of data EEPROM
}
else if(FCMD == cmdw){ // if EEPROM data write command
EEPROM.write(0,z1); // z1 record to a memory with 0 address
EEPROM.write(1,z2);
EEPROM.write(2,z3);
EEPROM.write(3,z4);
timer_init(); // reinitialize the timer
Serial.print("FWOK\r\n"); // send a message that the data is successfully written to EEPROM
}
}
[tabby title="Links"]
Follow Tinkernut!
Google +
Facebook
Twitter
[tabbyending]

 This is part two of the series that shows you how to make a cluster computer using Raspberry Pi’s!
This is part two of the series that shows you how to make a cluster computer using Raspberry Pi’s!
 [tabby title=”Step 3″]
[tabby title=”Step 3″]